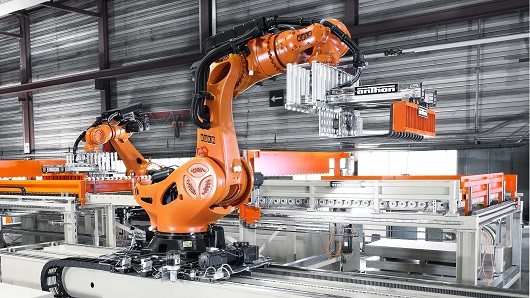
Robot antropomorfo (fonte: https://www.kuka.com/).
Un comparto dinamico richiede un’attenzione particolare e una progettazione di alto livello qualitativo: è il caso della robotica che a livello mondiale segna percentuali d’aumento a doppia cifra. I componenti, come i giunti R+W, giocano un ruolo chiave.
di Stefano Vinto
Il settore della robotica è fiorente a livello mondiale, con la Cina a fare da traino: gli aumenti percentuali a doppia cifra si susseguono da qualche anno, il numero di robot si avvia a raggiungere la somma di quelli presenti in Europa e Stati Uniti. In Italia l’incremento degli ordini è stato impressionante, con aumenti vicini al 70%, anche grazie al Piano Calenda; le ottime prestazioni si riflettono sul comparto dei componenti, in particolare per quanto riguarda produttori come R+W (www.rw-giunti.it), i cui giunti, torsionalmente rigidi e adatti ad applicazioni con dinamiche elevate, sono integrabili nella robotica cartesiana, ovvero, sistemi che prevedono un corretto posizionamento nello spazio utilizzando 3 o più assi correttamente interpolati per determinare le coordinate corrette della posizione richiesta.
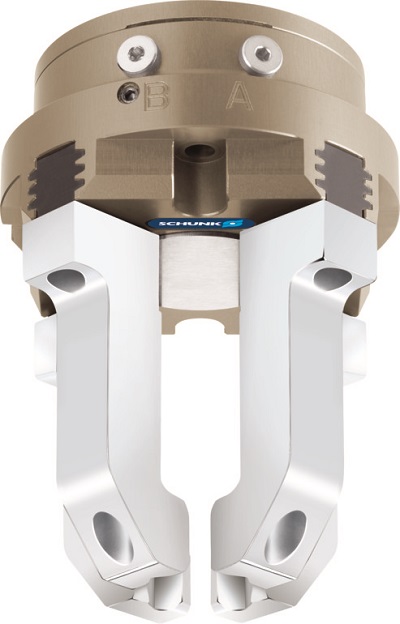
Pinza robotica autocentrante (fonte: https://schunk.com).
L’EVOLUZIONE DELLE NORMATIVE
La crescente importanza della robotica e dell’intelligenza artificiale pone interrogativi riguardo alla responsabilità, alla privacy e alla sicurezza: in caso di danni o prodotti difettosi, occorre determinare se attribuire la responsabilità al produttore o al proprietario, e così per i diritti, in caso di innovazioni sviluppate autonomamente dai robot. Le Istituzioni europee si stanno muovendo nel senso di definire un quadro normativo per queste situazioni, in modo da favorire lo sviluppo delle nuove tecnologie.

Pinza a presa pneumatica (fonte: https://schunk.com).
PROGETTAZIONE DI PINZE ROBOTICHE
Uno degli elementi caratterizzanti dei robot antropomorfi è la pinza robotica; la progettazione di questo genere di meccanismo ha aspetti di grande interesse, tuttora oggetto di diverse attività di ricerca in corso presso le più importanti università e centri di eccellenza internazionali.
Lo scopo principale della sintesi cinematica di una pinza robotica, componente del gruppo terminale di un robot antropomorfo (maggiormente diffuso in ambito industriale, affiancando in alcuni casi anche quelli cartesiani), consiste nella determinazione dei gradi di libertà del relativo meccanismo e nella successiva analisi della complessità strutturale dello stesso. Per conseguire tali scopi, è fondamentale ricorrere all’applicazione di due discipline: la sintesi cinematica; la teoria dei grafi.
La sintesi cinematica è una branca della cinematica che ha lo scopo di individuare dei metodi per l’ideazione di meccanismi, destinati all’ottenimento di date prestazioni e funzionalità. La sintesi cinematica esamina la generazione di movimenti (successione di un numero finito di posizioni di un componente del meccanismo), la generazione di traiettorie (relative a un punto individuato su un componente del meccanismo) e la generazione di funzioni (ovvero di legami tra il moto di due componenti, secondo una relazione prefissata).
Nel caso particolare della sintesi cinematica di una pinza robotica, spesso viene risolto un problema di cinematica diretta, dovendo procedere al calcolo della posizione (ed anche dell’orientazione, della velocità e dell’accelerazione) di un attuatore di estremità, noti i valori delle variabili di giunto.

Pinza a presa magnetica (fonte: https://schunk.com).
Teoria dei grafi
La teoria dei grafi è invece una disciplina trasversale ad altre di primaria importanza, quali la matematica, l’informatica e la geometria combinatoria; quest’ultima è quella maggiormente impiegata non solo nell’attività di progettazione di una pinza robotica. La geometria combinatoria si occupa dello studio di insiemi finiti e numerabili di oggetti, legati tra loro da relazioni di appartenenza e di ordine. La teoria dei grafi risolve anche problemi di geometria topologica.
Partendo quindi dalla fine degli anni ’90 la progettazione della pinza robotica ha costituito il fulcro di tutte le attività di ricerca che hanno portato al potenziamento delle linee di produzione automatizzate nel settore manifatturiero. La foto di apertura raffigura un moderno robot antropomorfo.

Pinza collaborativa a due griffe (fonte: https://schunk.com).
TIPOLOGIE DI PINZE ROBOTICHE
I meccanismi tipici di una pinza robotica vengono classificati come di seguito: sulla base delle dita di presa si distinguono: pinze a due dita; pinze a tre dita; pinze a dita multiple. Sulla base del numero di pinze montate sul terminale del robot antropomorfo, si distinguono invece: a pinza singola; a pinza doppia; a pinza multipla. Sulla base del cinematismo impiegato, si suddividono infine: a sistema articolato; a pignone/cremagliera; a camme; a vite; a cinghia e puleggia. Senza dimenticare i modelli a presa pneumatica o magnetica e quelli speciali.
La seconda foto mostra una moderna pinza a quattro griffe, ad azionamento pneumatico e autocentrante, mentre nelle immagini terza e quarta vengono mostrate una pinza a presa pneumatica e una a presa magnetica. Le due ultime tipologie di pinze mostrate sono ricorrenti principalmente in configurazioni robotiche di tipo cartesiano.
Le attuali innovazioni nel settore dell’automazione comprendono anche l’introduzione della robotica collaborativa (cobot), nella quale l’interazione uomo-robot è fondamentale al mantenimento della produttività di ben determinate aree di lavoro (workspace). A tale scopo è stata concepita la prima pinza collaborativa, mostrata nella quinta foto, che presenta una particolare ingegnerizzazione non solo in termini di azionamenti e sensori di prossimità, ma anche di cura nei materiali anticollisione e di segnalazione dello stato di funzionamento.
Il livello di progresso sempre più crescente della manipolazione automatica, alla luce delle prerogative di collaboratività sopra esposte, prevede un’attenzione verso la scelta degli accoppiamenti cinematici tali da garantire elevati livelli di precisione nell’attuazione e di limitazione della coppia. Saranno quindi ottimali quegli accoppiamenti con elevata rigidità torsionale, capacità di compensazione dei disallineamenti, mentre la limitazione della coppia assume un’importanza rilevante specie nei contesti su indicati in cui la movimentazione deve rispondere alle vigenti norme di sicurezza nelle interazioni con l’operatore, come gli standard DIN EN ISO 10218-1, DIN EN ISO 10218-2 e DIN EN ISO/TS 15066.

Schematizzazione di una pinza robotica a due griffe e grafo associato.
SINTESI CINEMATICA DI UNA PINZA ROBOTICA
Gran parte dei meccanismi di una pinza robotica rispettano l’equazione generica dei gradi di libertà:
l = m (L – c – 1) + F;
dove:
l = numero dei gradi di libertà; m = 3 (moto piano o sferico); m = 6 (moto spaziale); L = numero aste; c = numero coppie cinematiche; F = somma dei gradi di libertà relativi rilasciati dalle coppie cinematiche.
Passando poi all’applicazione della teoria dei grafi, si procede inizialmente alle assegnazioni seguenti: aste del meccanismo (L) → vertici del grafo (v); coppie cinematiche (c) → lati del grafo (e); definendo poi: NAI = numero di anelli indipendenti.
L’equazione generale dei gradi di libertà assume così la forma:
l = m (v – e – 1) + F;
con significato analogo dei simboli ricorrenti. Inoltre, risulta:
NAI = c – L + 1;
per cui:
F = l + NAI.
È interessante notare la forma assunta dalle precedenti relazioni, nel caso in cui nel meccanismo di una pinza robotica vengano impiegate coppie di ruote dentate. Con le opportune sostituzioni si ottiene:
L = l + 1 + NAI; c = L + 2 * NAI;
definendo poi:
cG = NAI = numero di coppie di ruote dentate; cR = l + NAI = numero dei perni in comune.
La maggior parte delle pinze robotiche sono realizzate con meccanismi ad anello aperto, le cui strutture sono in genere più semplici di quelli ad anello chiuso. Le coppie cinematiche più ricorrenti negli schemi progettuali delle pinze robotiche sono i perni, le coppie prismatiche, le coppie di ingranaggi, le coppie elicoidali e la coppia vite-madrevite.
Si consideri, ad esempio, la schematizzazione di una pinza robotica a due griffe, con dite di presa standard, come quella mostrata nella sesta figura.
Applicando le precedenti relazioni si ottiene: L = numero di aste = 6; c = numero di coppie cinematiche = 7; m = 3 (meccanismo piano).
→ l = 3 (6 – 7 – 1) + 7 = 1; NAI = 7 – 6 + 1 = 2.
Sulla base di questo semplice esempio (comunque costituente lo step fondamentale dell’attività di progettazione di una pinza robotica), è immediato apprezzare l’importanza comunque rilevante della sintesi cinematica nello sviluppo di pinze robotiche a griffe multiple.
Inoltre, l’apparente semplicità di quest’approccio non deve ingannare circa le reali difficoltà incontrate nelle ricerche condotte negli ultimi cinque anni, specie nell’estensione della fase di studio successiva alla sintesi cinematica che è la sintesi strutturale.
L’obiettivo principale della sintesi strutturale di una pinza robotica consiste nella determinazione degli scenari topologici per il conseguimento di un afferraggio ottimale (grasping).
Uno degli ambiti di ricerca più recenti riguarda, infatti, la realizzazione di pinze robotiche a dita di presa multiple con specifiche di afferraggio con destrezza. Un risultato interessante è quello proposto nel 2012 dall’Harvard Biorobotics Lab, rappresentato nella settima figura.
Nella tipologia di pinza robotica mostrata sono previste soluzioni per l’attuazione ancora troppo complesse e costose per una loro applicazione su larga scala. Le pinze robotiche di questo tipo sono sotto-attuate, ovvero sono quelle pinze in cui gli attuatori classici sono sostituiti da componenti passivi realizzati con meccanismi cedevoli (compliant mechanism) che (sebbene potranno costituire, a breve, una valida e meno costosa alternativa rispetto, ad esempio, agli azionamenti induttivi) sono tuttora molto difficili da trattare ai fini del conseguimento delle prerogative di adattabilità e qualità del grasping per i manipolatori.
Parallelamente a quest’approccio ve ne sono altri basati sul ricorso più spinto alla biomimesi. In quest’ultimo periodo, presso l’Università della California a San Diego viene presentata una ricerca riguardante l’imitazione delle dita adesive delle zampe di un gecko (come illustrato nella foto di chiusura).

Risultati degli studi di ottimizzazione numerica di una pinza a dita di presa multiple sotto-attuata (fonte: http://biorobotics.harvard.edu/robotic_hand_optimization.html).
FOCUS: IL RUOLO DEL FORNITORE DI COMPONENTI
Un’attività complessa come la progettazione in ambito robotico può trovare un valido supporto nei fornitori di componenti. È il caso di R+W, azienda leader nella produzione di giunti e alberi di trasmissione, in grado di mettere la propria esperienza a disposizione del progettista. Nel settore della robotica, R+W fornisce una gamma completa di soluzioni per tutte le esigenze di trasmissione e limitazione della coppia, quali: giunti a soffietto metallico della serie BK, giunti a elastomero della serie EK, limitatori di coppia della serie SK e giunti con allunga della serie ZA e EZ.
I giunti BK a soffietto metallico, precisi e senza gioco, sono molto apprezzati per il basso momento di inerzia, la totale assenza di necessità di manutenzione, la durata praticamente infinita e soprattutto la totale affidabilità. I giunti a elastomero della serie EK combinano elevata flessibilità e buona resistenza. Smorzano vibrazioni e impatti compensando i disallineamenti degli alberi. Molti elementi condizionano la progettazione dei giunti a elastomero: da fattori quali il carico, l’avviamento e la temperatura dipende la durata dell’inserto. L’elemento elastomerico è disponibile in diverse durezze Shore, per trovare sempre un compromesso adatto fa le proprietà di smorzamento, la rigidità torsionale e la correzione dei disallineamenti per la maggior parte delle applicazioni.
I limitatori di coppia SK, assolutamente privi di gioco, permettono di proteggere il sistema motore in caso di sovraccarico, scollegandolo dalla parte condotta nel giro di pochi millisecondi. Estremamente precisi, trasmettono la coppia con grande accuratezza e intervengono solo in caso di effettiva necessità. Inoltre, consentono un riarmo semplice e rapido non appena viene rimossa la causa del sovraccarico.
I giunti con allunga della serie ZA-EZ sono ideali per collegamenti con grandi distanze assiali, eventualità spesso presente nelle macchine da imballaggio. Sono facili da montare e smontare senza che occorra muovere o allineare gli elementi da collegare. R+W ha in assortimento giunti con allunghe fino a 6 m, che non necessitano di supporto intermedio. Disponibili in versioni speciali per quanto riguarda materiali, tolleranze, dimensioni e prestazioni, i giunti con allunga R+W se ben dimensionati e montati correttamente non hanno alcuna necessità di manutenzione e una durata praticamente infinita. ©tecnelab

Particolare delle dita di presa biomimetiche, ispirate alle zampe adesive del gecko.














