
Il robot lombrico dell’IIT di Genova, composto da cinque sezioni che si comportano come i segmenti, o metameri, del corpo di questi anellidi.
Il laboratorio di robotica soft bioispirata dell’Istituto Italiano di Tecnologia, guidato da Barbara Mazzolai, ha presentato un nuovo prototipo di automa modellato sui lombrichi e sul loro modo di muoversi nel terreno.
di Anna De Marco
Anche dai lombrichi si può imparare qualche cosa. Lo dimostra un team di ricerca dell’Istituto Italiano di Tecnologia di Genova (IIT), che ha messo a punto un robot capace di muoversi in un ambiente sotterraneo grazie a meccanismi sviluppati e utilizzati in natura dagli anellidi. Il team è coordinato da Barbara Mazzolai, scienziata pioniera della soft robotics, la robotica “soffice”, di cui è stata sostanzialmente l’ideatrice insieme con la collega Cecilia Laschi.
Mazzolai, che di formazione è biologa, da sempre sostiene l’importanza della biomimesi, cioè dell’imitazione della natura nello sviluppo di soluzioni robotiche. Un approccio che richiede innanzi tutto lo studio delle specie viventi prese a modello e che spesso porta non soltanto ad avanzamenti in campo ingegneristico, ma anche a scoprire particolarità nel mondo animale o vegetale su cui il tradizionale studio naturalistico difficilmente si concentra.

Le cinque sezioni del robot lombrico sono in un materiale elastomerico, che può espandersi o contrarsi regolando l’afflusso di aria compressa.
UN TEAM INTERNAZIONALE
Nel suo percorso di robotica soft e biomimetica, Mazzolai ha per esempio studiato il funzionamento dei bracci dei polpi, così come quello utilizzato dalle radici delle piante per progredire e farsi strada nel terreno. Da un’estensione di quest’ultimo lavoro, che aveva portato allo sviluppo di un robot chiamato Plantoide, è chiaramente gemmata anche questa ricerca, pubblicata lo scorso gennaio nei “Scientific Reports” della rivista scientifica Nature. A firmare il paper, oltre alla stessa Mazzolai, sono stati Riddhi Das, Saravana Prashanth Murali Babu, Francesco Visentin e Stefano Palagi, tutti affiliati al Bioinspired Soft Robotics Lab dell’IIT di Genova, ma con altre collaborazioni all’attivo, come per esempio all’Istituto di Biorobotica della Scuola Superiore Sant’Anna di Pisa, all’Università di Verona o all’Università di Odense, in Danimarca.
TECNOLOGIA BIOISPIRATA
Il prototipo descritto su Scientific Reports rappresenta un primo modello di tecnologia bioispirata applicabile in futuro per l’esplorazione sotterranea, in spazi confinati e di altri pianeti. La natura offre numerosi esempi di animali che per muoversi ed esplorare l’ambiente usano la flessibilità del loro corpo e la capacità di generare onde sulla sua lunghezza, come per esempio i serpenti, le lumache, i bruchi e i lombrichi. Alcuni di questi movimenti si trovano anche nelle radici delle piante.
Il robot lombrico nato nel laboratorio coordinato da Mazzolai è l’ultimo ideato dal gruppo di ricerca ed è costituito da un prototipo lungo 45 cm e pesante 605 g.
La sua creazione è stata possibile grazie allo studio dei lombrichi, che strisciano, sia dentro che sulla superficie del suolo, alternando la contrazione di strati muscolari, i quali generano onde peristaltiche retrograde, cioè indirizzate all’indietro. Il corpo, costituito da diversi singoli segmenti (metameri), è riempito da un fluido attraverso cui l’animale controlla la pressione interna per agire con forze verso l’esterno, e quindi mettere in movimento solo specifici metameri, in modo indipendente e localizzato, creando così configurazioni differenti.
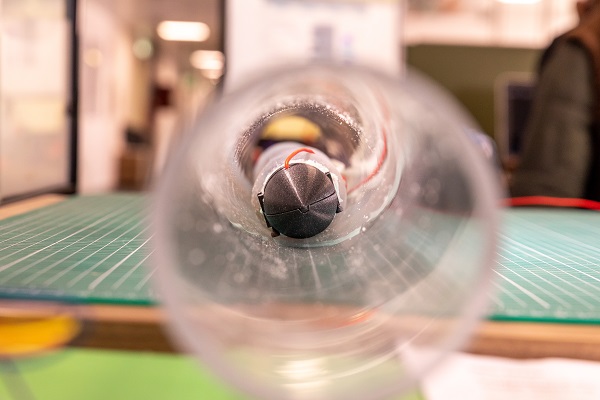
Test in laboratorio del robot, che può avanzare a una velocità di circa 1,35 mm/s.
I MECCANISMI DI FUNZIONAMENTO
Il gruppo di ricerca ha tradotto queste caratteristiche in nuove soluzioni robotiche, in particolare per replicare i movimenti muscolari, il volume costante della cavità interna (celoma) e la presenza di setole sul corpo. I movimenti dei muscoli antagonisti sono stati replicati attraverso la realizzazione di attuatori soffici peristaltici (PSA); ogni attuatore può allungarsi o contrarsi quando l’aria viene pompata all’interno o all’esterno. L’intero corpo robotico è costituito da cinque di questi attuatori, collegati tra loro. Ogni attuatore è ricoperto da un materiale elastomerico (una gomma) che contiene una quantità fissa di fluido, riproducendo così le caratteristiche del celoma. Ogni segmento diventa più corto e più ampio nella circonferenza, spingendo verso l’esterno lungo la parte radiale, mentre i muscoli longitudinali della camera interna si contraggono. In modo antagonistico, i segmenti diventano più lunghi e sottili, con la contrazione dei muscoli presenti sulla conferenza, ottenendo così delle forze di penetrazione lungo l’asse.
DESTINAZIONE PIANETI ALIENI
Ogni singolo attuatore può allungarsi di 10,97 mm con una pressione positiva di 1 bar e una massima compressione di 11,13 mm a una pressione negativa di 0,5 bar; si hanno così in un solo unico modulo sia forze radiali che longitudinali. Questo tipo di attuatore (cioè di sistema utilizzato per esercitare forze in un sistema robotico) è una novità introdotta dallo studio dell’IIT e costituisce il principale motivo di interesse di tutto lo studio,
Il movimento del robot su superfici piane è poi stato ottimizzato inserendo piccole pastiglie di materiale ruvido per generare attrito passivo, ispirandosi così alle setole presenti sul corpo dei lombrichi. La velocità a cui il robot può muoversi è di circa 1,35 mm/s. Le applicazioni che dispositivi di questo tipo potrebbero avere in futuro sono molte, dall’esplorazione sotterranea alle operazioni di scavo e ricerca, oltre che l’indagine del terreno di altri pianeti. ©WE ROBOTS

Il prototipo apre nuove prospettive per l’esplorazione autonoma in ambienti sotterranei, per cui finora sono state sviluppate poche soluzioni robotiche.














